








[eBook] ARM-9을 이용한 임베디드 리눅스 시스템
23,000원
[eBook] ARM-9을이용한임베디드리눅스시스템 CD수록 (1판), 박원성, 정기철, ARM 9을 이용한 임베디드 리눅스 시스템
[eBook] ARM-9을이용한임베디드리눅스시스템 CD수록 (1판), 박원성, 정기철, ARM 9을 이용한 임베디드 리눅스 시스템
| 도서명 | [eBook] ARM-9을 이용한 임베디드 리눅스 시스템 (CD 수록) (1판) |
|---|---|
| 저자 | 박원성/정기철 |
| 출판사 | 복두출판사 |
| 판수(크기) | 1판 |
| 쪽수 | 408 |
| 판형 | 46배판 |
| 출판일 | 2012/03/02 |
| ISBN | 978-89-8000-972-5 |
제1장 임베디드 리눅스 시스템
1.1 임베디드 시스템이란?
1.1.1 임베디드 시스템의 정의
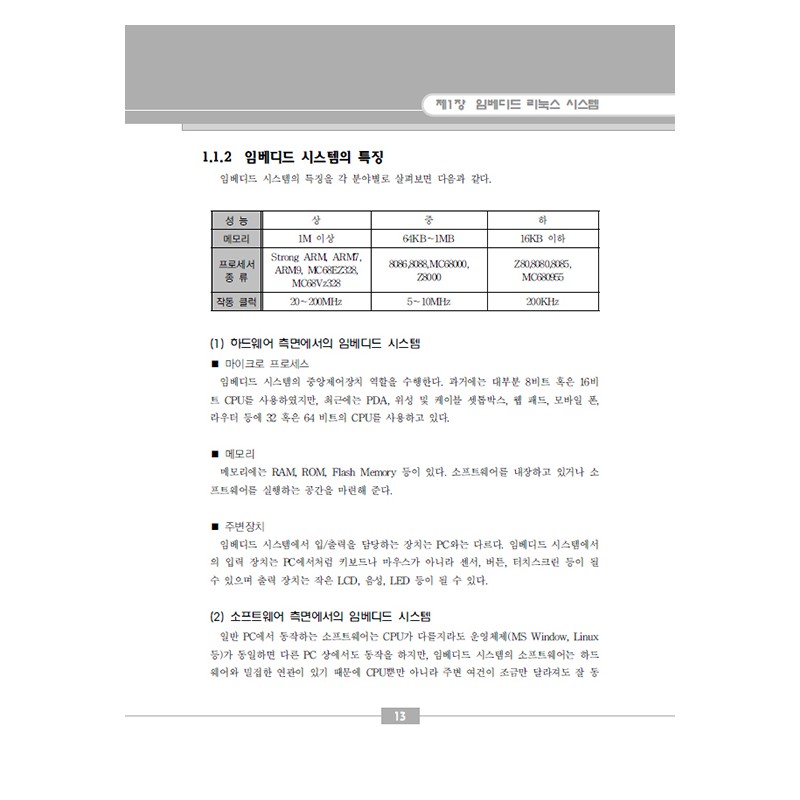
1.1.2 임베디드 시스템의 특징
1.2 임베디드 리눅스 시스템(Embedded Linux System)
1.2.1 임베디드 리눅스의 특징
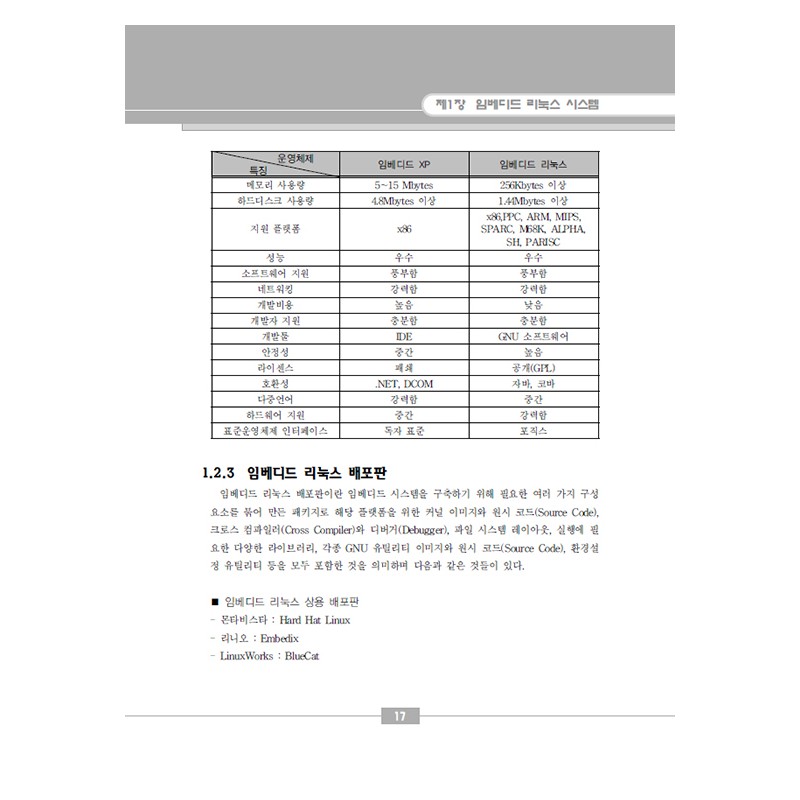
1.2.2 타 임베디드 시스템 운영체제와의 비교
1.2.3 임베디드 리눅스 배포판
제2장 리눅스 운영체제
2.1 유닉스(UNIX)와 리눅스(LINUX)
2.1.1 유닉스(UNIX) 소개
2.1.2 리눅스(LINUX)의 유래
2.1.3 유닉스(Unix)와 리눅스(Linux)
2.1.4 마이크로소프트사의 윈도우즈(Windows)와 X 윈도우
2.1.5 리눅스(LINUX)의 구성
2.2 리눅스(LINUX) 운영체제(OS) 설치하기
2.3 리눅스(LINUX) 기본 명령어 익히기
2.4 리눅스(LINUX)의 파일 시스템(File System)
2.4.1 파일의 종류
2.4.2 파일 시스템의 역할
2.4.3 리눅스 파일 시스템의 구성
2.5 리눅스 쉘 프로그래밍(Linux Shell Programming)
2.5.1 vi 텍스트 에디터
2.5.2 리눅스 쉘(Linux Shell)
2.5.3 리눅스 쉘(Linux Shell) 명령어
2.5.4 쉘 스크립트(Shell Script)
2.5.5 쉘 변수(Shell Variable)
2.5.6 쉘 프로그래밍 문법(Shell Programming)
2.6 GCC(GNU C Compiler)
2.6.1 GCC(GNU C Compiler) 개요
2.6.2 GCC 헤더 파일의 디렉토리
2.6.3 GCC 사용법
2.7 메이크 파일(Makefile)
제3장 T/B(Training Board)의 소개 및 개발 환경 구축
3.1 T/B(Training Board)의 하드웨어 자원
3.1.1 CPU Module
3.1.2 베이스 보드(Base Board)의 구성
3.2 T/B(Training Board)의 소프트웨어 자원 소개 및 개발 환경 구축
3.2.1 T/B(Training Board)의 소프트웨어 자원 소개
3.2.2 T/B(Training Board)를 위한 개발 환경 구축
제4장 디바이스 드라이버(Device Driver)
4.1 디바이스 드라이버(Device Driver)
4.1.1 디바이스 드라이버란?
4.1.2 커널 모듈 변경(모듈의 커널 포함과 동적 링크)
4.2 네트워크 파일 시스템 - NFS(Network File System)
4.2.1 NFS(Network File System)의 이해
4.2.2 PC 리눅스 시스템과 T/B 간의 NFS 설정
제5장 PicoGUI
5.1 PicoGUI의 개념
5.2 PicoGUI 서버 탑재
5.2.1 PicoGUI 서버(이하 pgserver라 칭함) 생성
5.2.2 pgserver 서버의 T/B 탑재
5.3 PicoGUI 응용 프로그램(Application)
제6장 RS-232C 통신과 GPS 모듈
6.1 RS-232C 개요
6.1.1 시리얼 통신(Serial Communication)이란?
6.1.2 RS-232C
6.2 T/B(Training Board)에서의 RS-232C 인터페이스
6.2.1 S3C2410의 UART
6.2.2 RS-232 Transceiver
6.3 RS-232C 통신 프로그래밍(응용 프로그래밍 측면)
6.3.1 시리얼 포트 개방/폐쇄(Opening/Closing a Serial Port)
6.3.2 기본 입력과 출력(Write/Read)
6.3.3 ioctl()과 termios 구조체
6.4 RS-232C 통신 예제 프로그래밍 작성
6.5 RS-232C를 이용한 GPS 좌표 취득
6.5.1 GPS(Global Positioning System)란?
6.5.2 T/B의 GPS 모듈(Lassen SQ GPS Module)
6.5.3 T/B의 GPS 좌표 취득 예제
제7장 문자(Char) 디바이스 드라이버 작성
7.1 문자 디바이스 드라이버(Character Device Driver)
7.2 주 번호(Major Number)& 부 번호(Minor Number)
7.2.1 주 번호 할당(Major Number Allocation)-register_chrdev()
7.2.2 부 번호(Major Number)의 활용
7.3 문자 디바이스 드라이버의 등록 및 해제
7.4 저수준 입출력 함수(응용 프로그래밍 측면에서의 정의)
7.5 파일 오퍼레이션 구조체(struct file_operations)
7.5.1 파일 오퍼레이션 구조체(struct file_operations)의 이해
7.5.2 파일 오퍼레이션 구조체와 저수준 입출력 함수
7.6 문자(Char) 디바이스 드라이버의 최소 구성
제8장 Memory Mapped I/O 제어와 디바이스 드라
이버의 커널 포함
8.1 메모리 맵 I/O(Memory Mapped I/O)의 이해
8.2 메모리 매핑(Memory Mapping)
8.2.1 물리 주소와 가상 주소(Physical Address & Virtual Address)
8.2.2 T/B의 메모리 매핑
8.3 디바이스 드라이버의 커널 포함
8.3.1 디바이스 드라이버 커널 포함에 대한 이해
8.3.2 디바이스 드라이버의 T/B 커널 포함
제9장 7 Segment LED 제어
9.1 7-Segment LE
9.2 T/B의 7-Segment
9.3 T/B의 7-Segment 제어
9.3.1 디바이스 드라이버 및 응용 프로그램 분석
9.3.2 디바이스 드라이버 및 응용 프로그램 실행
제10장 CHARACTER LCD 제어
10.1 문자형(Character)
10.2 T/B의 문자형(Character) LCD 모듈
10.3 T/B의 문자형(Character) LCD 모듈 제어
10.3.1 LCD 모듈의 기본 동작 이해
10.3.2 LCD 모듈의 제어
10.3.3 LCD 모듈 제어를 위한 디바이스 드라이버 작성
10.3.4 LCD 모듈 제어를 위한 디바이스 드라이버 실행
제11장 키패드(KEYPAD) 탑재
11.1 키 스캔(Key Scan) 알고리즘
11.2 T/B의 키패드(Key Pad)
11.3 키패드(KeyPad) 제어를 위한 디바이스 드라이버 작성
11.4 키패드(KeyPad) 제어를 응용 프로그램 작성
11.5 NFS를 이용한 키패드(KeyPad) 제어
제12장 스텝 모터(STEP MORTER) 제어
12.1 스텝모터(Step Motor) 개요
12.1.1 스텝모터(Step Motor)의 종류
12.1.3 T/B의 스텝 모터 및 스텝 모터 구동 원리
12.2 스텝모터(Step Motor) 제어
12.2.1 스텝 모터 제어를 위한 디바이스 드라이버 작성
12.2.2 스텝 모터 제어를 위한 응용 프로그램 작성
12.2.3 스텝 모터 제어를 위한 응용 프로그램 실행
제13장 기타 드라이버 및 도구
13.1 PCMCIA란?
13.1.1 PCMCIA 개요
13.1.2 PCMCIA 카드 인터페이스
13.2 무선 랜(Wireless LAN) PCMCIA 카드
13.3 WIS 비디오 엔코더(Encoder) 드라이버 및 웹 카메라
임베디드 리눅스 시스템은 기능적 측면과 안정성 등에서의 강인함이 이미 세계적으로 잘 알려져 있으나 우리나라에서는 아직 보편화 되어있지는 않으며, 특히 지능형 로봇을 위한 임베디드 리눅스를 설계할 수 있는 인재 양성은 매우 절실한 실정이다.
그럼에도 불구하고 지능형 로봇과 관련한 임베디드 리눅스 시스템을 교육할 수 있는 교육 장비와 학습 교재는 매우 부족한 것이 사실이다.
따라서, 저자는 이러한 현실적 문제점을 감안하여 본 서를 출간하였으며, 본 서는 ARM-9 코어를 가진 임베디드 마이크로프로세서를 이용하여, 임베디드 리눅스 시스템을 기초부터 응용까지 단계적으로 학습하고 궁극적으로는 지능형 로봇을 설계할 수 있는 능력을 기를 수 있도록 구성하였다.
본 서는 실험 실습을 위한 시스템 환경 구축부터 시작하여 지능형 로봇의 기능별 모듈을 각각 분리하여 모듈 단위별(유/무선 네트웍, RS-232 통신, GPS, 그래픽/문자 사용자 인터페이스, 액츄에이터 구동, 영상 처리 등)로 각 장을 구성하였다. 또한 각 장에는 해당 모듈의 하드웨어적 구동원리 및 제어 방법, 그리고 실습을 위한 프로그래밍 소스 등을 모두 포함하고 있으며, 해당 모듈에 대한 실험 절차 등을 자세히 다루고 있기 때문에 초보자라도 임베디드 리눅스 시스템을 쉽게 이해할 수 있도록 구성하였으며, 전문가인 경우 지능형 로봇을 위한 임베디드 리눅스 시스템 설계 시 좋은 참고서가 될 것이다.
[eBook] ARM-9을이용한임베디드리눅스시스템 CD수록 (1판), 박원성, 정기철, ARM 9을 이용한 임베디드 리눅스 시스템
| 재화 등의 배송방법에 관한 정보 | 상품 상세설명페이지 참고 |
|---|---|
| 주문 이후 예상되는 배송기간 | 상품 상세설명페이지 참고 |
| 제품하자가 아닌 소비자의 단순변심, 착오구매에 따른 청약철회 시 소비자가 부담하는 반품비용 등에 관한 정보 | 배송ㆍ교환ㆍ반품 상세설명페이지 참고 |
| 제품하자가 아닌 소비자의 단순변심, 착오구매에 따른 청약철회가 불가능한 경우 그 구체적 사유와 근거 | 배송ㆍ교환ㆍ반품 상세설명페이지 참고 |
| 재화등의 교환ㆍ반품ㆍ보증 조건 및 품질보증 기준 | 소비자분쟁해결기준(공정거래위원회 고시) 및 관계법령에 따릅니다. |
| 재화등의 A/S 관련 전화번호 | 상품 상세설명페이지 참고 |
| 대금을 환불받기 위한 방법과 환불이 지연될 경우 지연에 따른 배상금을 지급받을 수 있다는 사실 및 배상금 지급의 구체적 조건 및 절차 | 배송ㆍ교환ㆍ반품 상세설명페이지 참고 |
| 소비자피해보상의 처리, 재화등에 대한 불만처리 및 소비자와 사업자 사이의 분쟁처리에 관한 사항 | 소비자분쟁해결기준(공정거래위원회 고시) 및 관계법령에 따릅니다. |
| 거래에 관한 약관의 내용 또는 확인할 수 있는 방법 | 상품 상세설명페이지 및 페이지 하단의 이용약관 링크를 통해 확인할 수 있습니다. |
| 반품사유 | 반품 배송비 부담자 |
|---|---|
| 단순변심 |
고객 부담
최초 배송비를 포함해 왕복 배송비가 발생합니다. 또, 도서/산간지역이거나 설치 상품을 반품하는 경우에는 배송비가 추가될 수 있습니다. |
| 상품의 불량 또는 오배송 | 고객부담 아님 |
| 진행 상태 | 결제완료 | 상품준비중 | 배송지시/배송중/배송완료 |
|---|---|---|---|
| 어떤 상태 | 주문 내역 확인 전 | 상품 발송 준비 중 | 상품이 택배사로 이미 발송 됨 |
| 환불 | 즉시환불 | 구매취소 의사전달 → 발송중지 → 환불 | 반품회수 → 반품상품 확인 → 환불 |
| 결제수단 | 환불시점 | 환불방법 |
|---|---|---|
| 신용카드 | 취소완료 후, 3~5일 내 카드사 승인취소(영업일 기준) | 신용카드 승인취소 |
| 계좌이체 |
실시간 계좌이체 또는 무통장입금 취소완료 후, 입력하신 환불계좌로 1~2일 내 환불금액 입금(영업일 기준) |
계좌입금 |
| 휴대폰 결제 |
당일 구매내역 취소시 취소 완료 후, 6시간 이내 승인취소 전월 구매내역 취소시 취소 완료 후, 1~2일 내 환불계좌로 입금(영업일 기준) |
당일취소 : 휴대폰 결제 승인취소 익월취소 : 계좌입금 |
| 포인트 | 취소 완료 후, 당일 포인트 적립 | 환불 포인트 적립 |

대표상담전화